CHCI Participation in VL/HCC, Grace Hopper, CHI Play, and AHFE
October 10, 2022
Jesse Harden at VL/HCC
Jesse Harden presented his paper “Exploring Organization of Computational Notebook Cells in 2D Space” (co-authored with his advisor Chris North and Elizabeth Christman, Nurit Kirshenbaum, John Wenskovitch (VT/CHCI alum), and Jason Leigh) at the 2022 IEEE Symposium on Visual Languages and Human-Centric Computing (VL/HCC) held September 12-16 in Rome, Italy. The research of Harden et al., is part of the NSF-funded SAGE3 project for creating new software to support collaborative data science on distributed and large display systems. They investigated through a user study whether and how users would organize cells in a ‘2D Computational Notebook.’

The IEEE Symposium on Visual Languages and Human-Centric Computing is the premier international forum for research on this topic. Established in 1984, the conference supports the design, theory, application, and evaluation of computing technologies and languages for programming, modeling, and communicating, which are easier to learn, use, and understand by people.

Abstract: Representing branching and comparative analyses in computational notebooks is complicated by the 1-dimensional (1D), top-down list arrangement of cells. Given the ubiquity of these and other non-linear features, their importance to analysis and narrative, and the struggles current 1D computational notebooks have, enabling organization of computational notebook cells in 2 dimensions (2D) may prove valuable. We investigated whether and how users would organize cells in such a "2D Computational Notebook" through a user study and gathered feedback from participants through a follow-up survey and optional interviews. Through the user study, we found 3 main design patterns for arranging notebook cells in 2D: Linear, Multi-Column, and Workboard. Through the survey and interviews, we found that users see potential value in 2D Computational Notebooks for branching and comparative analyses, but the expansion from 1D to 2D may necessitate additional navigational and organizational aids.
Shakiba Davari and Morva Saaty at Grace Hopper

Shakiba Davari and Morva Saaty received scholarships to participate in Grace Hopper, September 20-23 in Orlando, Florida. Inspired by the legacy of Admiral Grace Murray Hopper, the AnitaB.org flagship event Grace Hopper Celebration has brought the research and career interests of women in computing to the forefront since 1994.
Morva Saaty at CHCI Play 2022
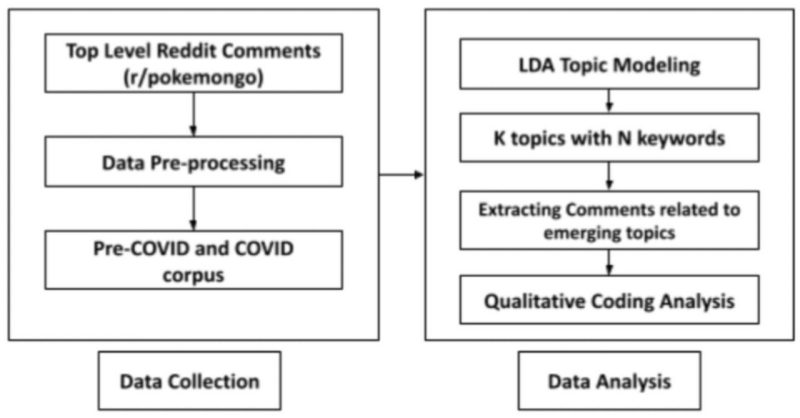
Morva Saaty will present her research paper titled, “Pokémon GO with Social Distancing: Social Media Analysis of Players' Experiences with Location-based Games” at the ACM CHI PLAY ’22 conference. She is the primary author with contributions from Derek Haqq, Mohammadreza Beyki, Taha Hassan, and Scott Mccrickard.

The goal of CHI Play is to highlight and foster discussion of current high quality research in games and HCI as foundation for the future of digital play. To this end, the conference features streams that blend academic research papers, masterclasses, interactive play demos, student game design competition, poster session and industry insights. This year the conference is taking place in Bremen, Germany, November 2 -5.





Abstract: Exergaming incorporates exercising into video games, with the purpose of physically engaging users in the gameplay. Location-based games have gained the attention of exergame designers as they have been able to motivate people to exercise and spend time outdoors. Studies have shown the impact of current exergames to intervene with sedentariness by containing some elements of nature and outdoor activities. However, it is unclear how location-based mobile exergames can engage users with nature throughout playing and exercising. This paper presents insights from an exploratory self-study of experiences provided by the most popular location-based mobile game, Pokémon GO, concerning its potential to engage players outdoors. We also provide design considerations for location-based mobile exergames to engage players in nature while becoming physically active.
Palak Varshney at AHFE 2022
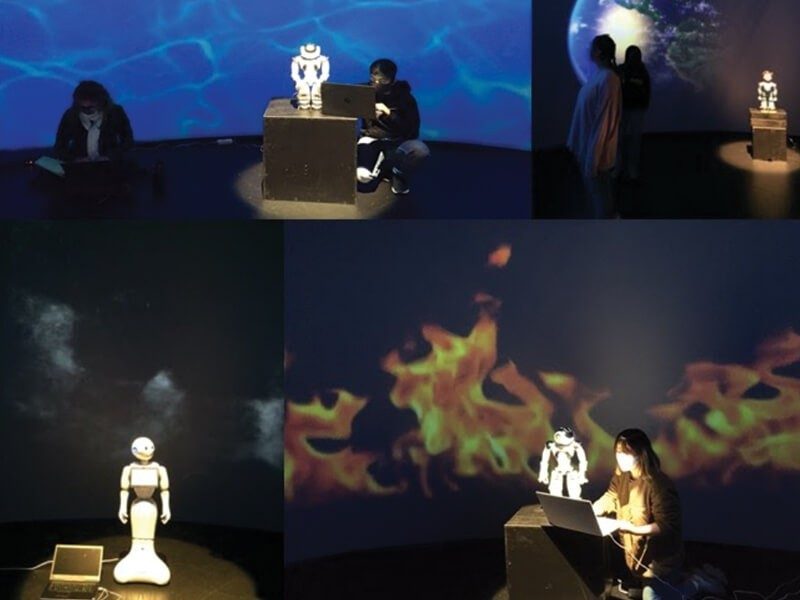
Palak Varshney, a senior in the Grado Department of Industrial and Systems Engineering, presented her research with Dr. Rafael Patrick, Assistant Professor, titled “Inspector Assistant Robots: Future Worker Impressions and Cognitive Workload Assessments” at the AHFE 2022 conference. The International Conference on Applied Human Factors and Ergonomics (AHFE), held in New York, July 24-28, 2022, provides an international forum for the dissemination and exchange of scientific information on theoretical, generic, and applied areas of human factors and ergonomics.

Led by Dr. Afsari, an Assistant Professor in the Myers-Lawson School of Construction, the project is supported through NSF’s Future of Work at the Human-Technology Frontier (FW-HTF). Dr. Patrick leads the Human IMPAC-T Lab where Varshney is conducting her research focused on the Future Worker.

Abstract: Construction progress monitoring is mostly a manual process with repetitive in-person visual inspections that have led to inconsistent, time-consuming, labor-intensive, and error-prone data acquisition and analysis which relies mainly on the inspector’s level of experience. In response, automated processes using emerging technologies such as robots are under consideration to address existing limitations and inefficiencies of the manual processes. To assess the potential for technology acceptance, the primary objective of the current research is to develop a conceptual framework for human-in-the-loop and human-robot teaming in future construction progress monitoring. To accomplish this, the roles of the humans-in-the-loop must be defined based on their associative roles within the overall construction process. From this, two classifications of humans have been defined as (1) the inspector who performs inspection tasks for construction progress monitoring and (2) the trade workers with whom the inspector interacts during the on-site inspection in progress monitoring. The current research investigates new discoveries in human-robot teaming for inspection in unstructured and dynamically changing environments by performing a preliminary investigation into the potential of Boston Dynamics’ quadrupedal robot, SPOT, as an effective assistive tool for construction progress monitoring. The experiments were a series of on-site data collection sessions (N = 13) conducted on three active construction sites all at varying stages of construction. During the experiment, inspector trade worker reflections were obtained through semi-structured interviews while cognitive workload assessments using NASA TLX were performed during controlled on-site human-robot construction progress monitoring tasks to assess the potential use of SPOT as an assistive tool. Results indicate an expected increase in workload during training for human-robot inspections, however, impressions of SPOT were positive and suggestive of technology acceptance. The research questions addressed were (1) What are the human inspector requirements of their assistant robot in construction progress monitoring; and (2) What interactions between trade workers and the inspector assistant robot can occur on-site during construction progress monitoring?
Related Content
-
General Item